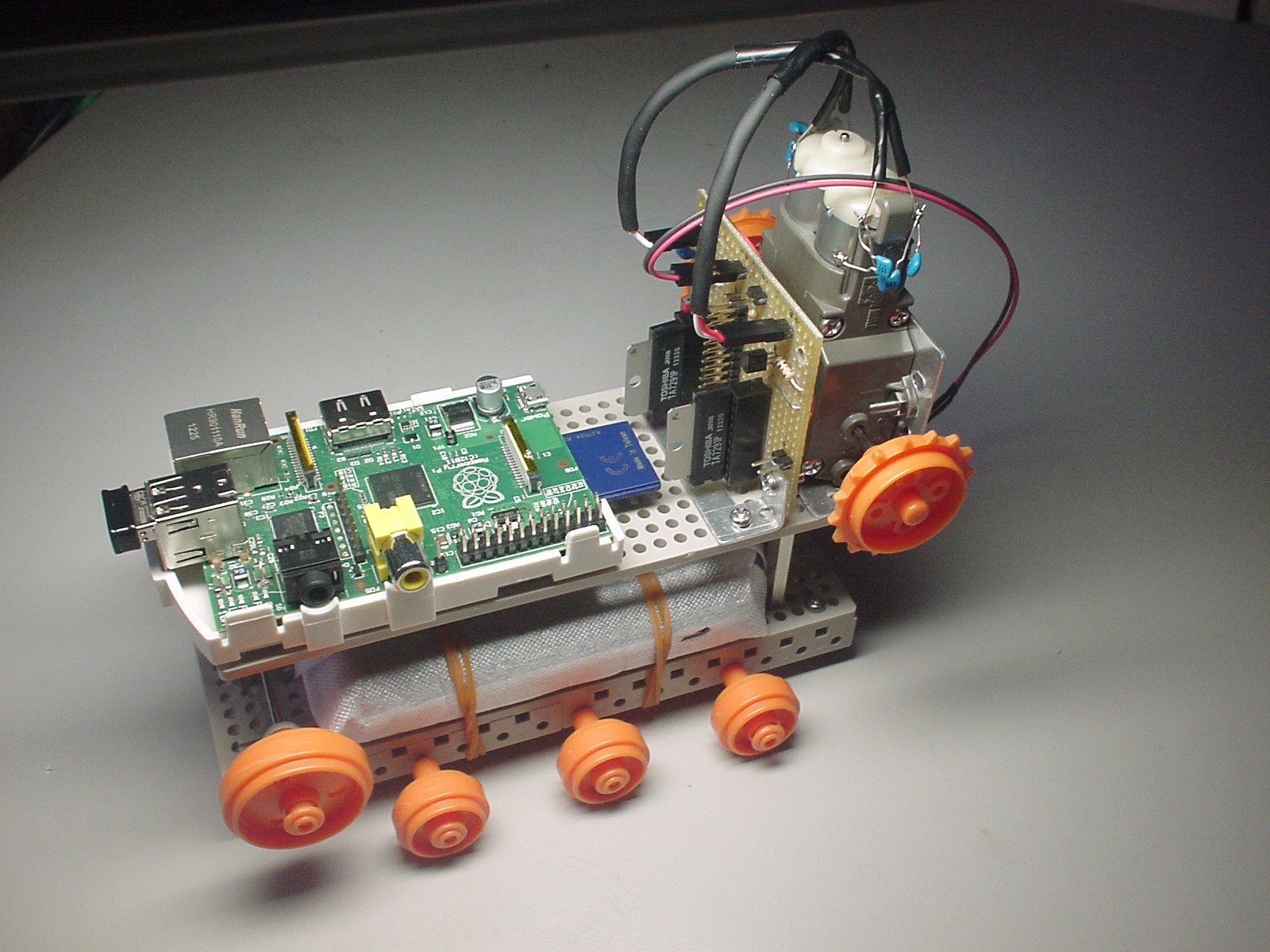
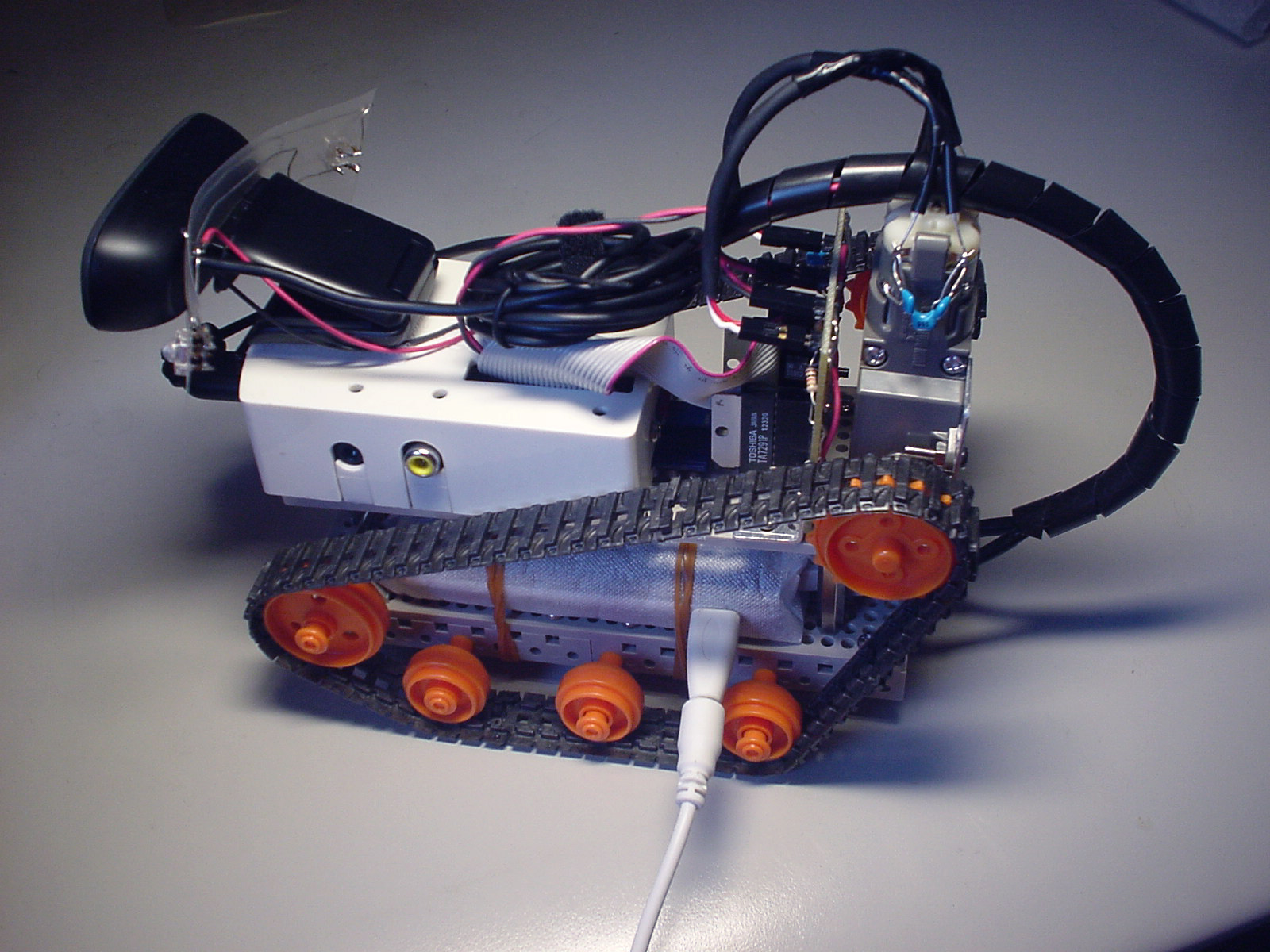
Raspberry PiによるWeb遠隔無線制御カー
スマホやタブレットのWebブラウザを使って遠隔地から操作できる移動車を作った。
仕様
| 駆動方式 | 左右独立クローラ |
| 動力 | DCモータ2台 |
| モータ制御方式 | PWM |
| 電源 | リチュウムイオンバッテリ |
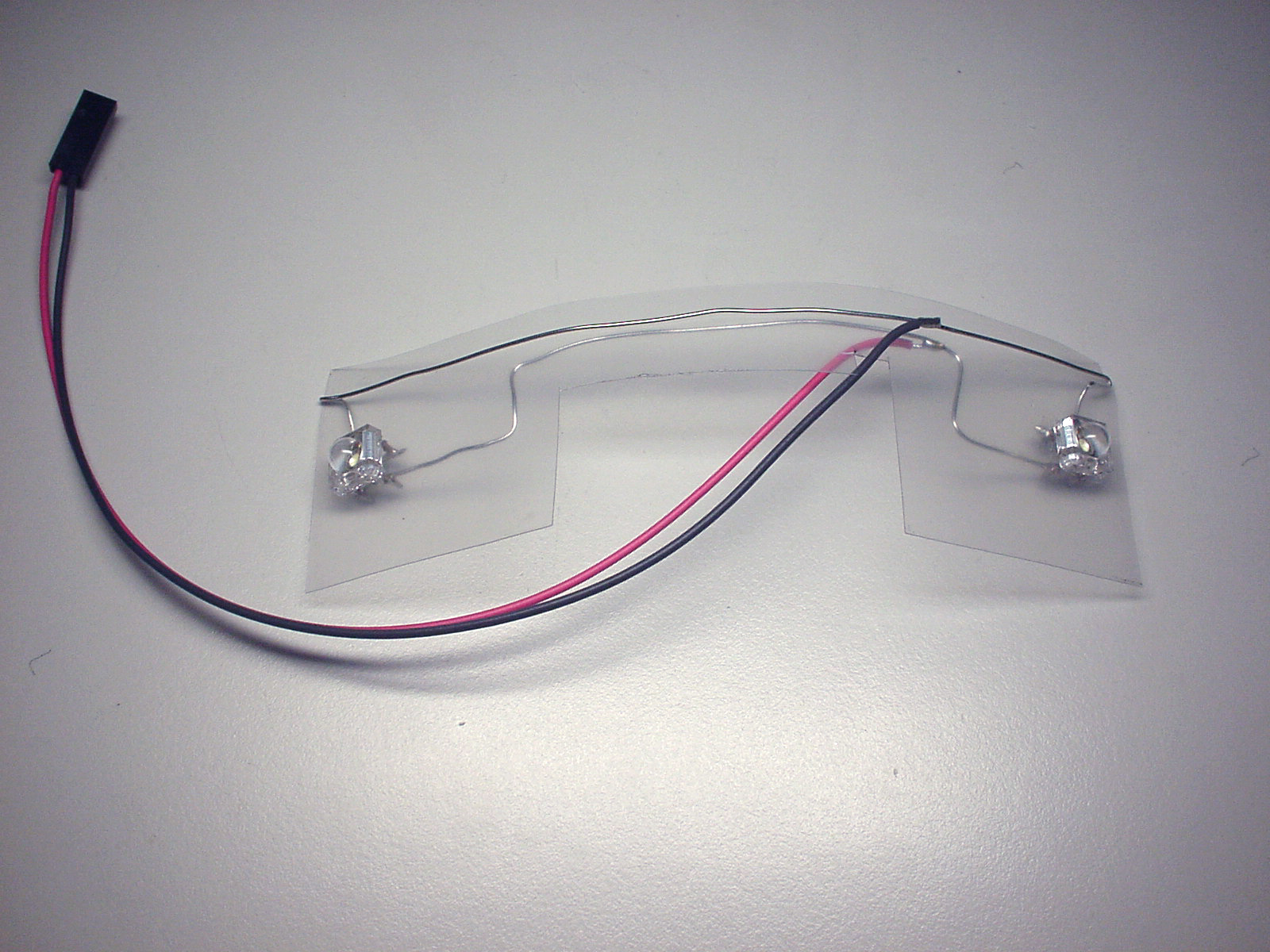
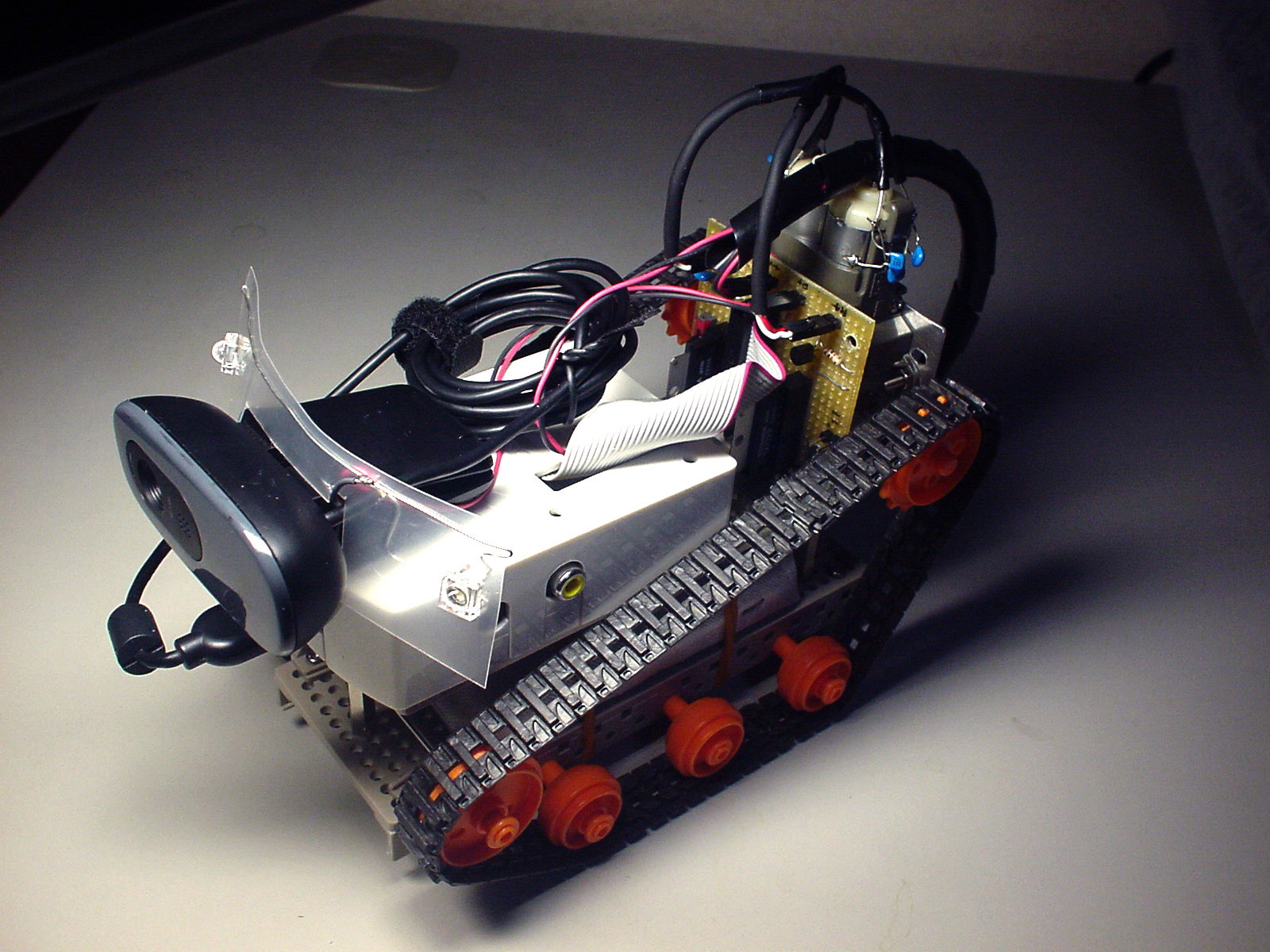
| 装備 | USBカメラおよびLEDによる照明 |
| 操作方法 | 無線LAN経由Webブラウザによる |
| 大きさ | 長さ19cm 幅10.5cm 高さ14cm(すべて約:-p) |
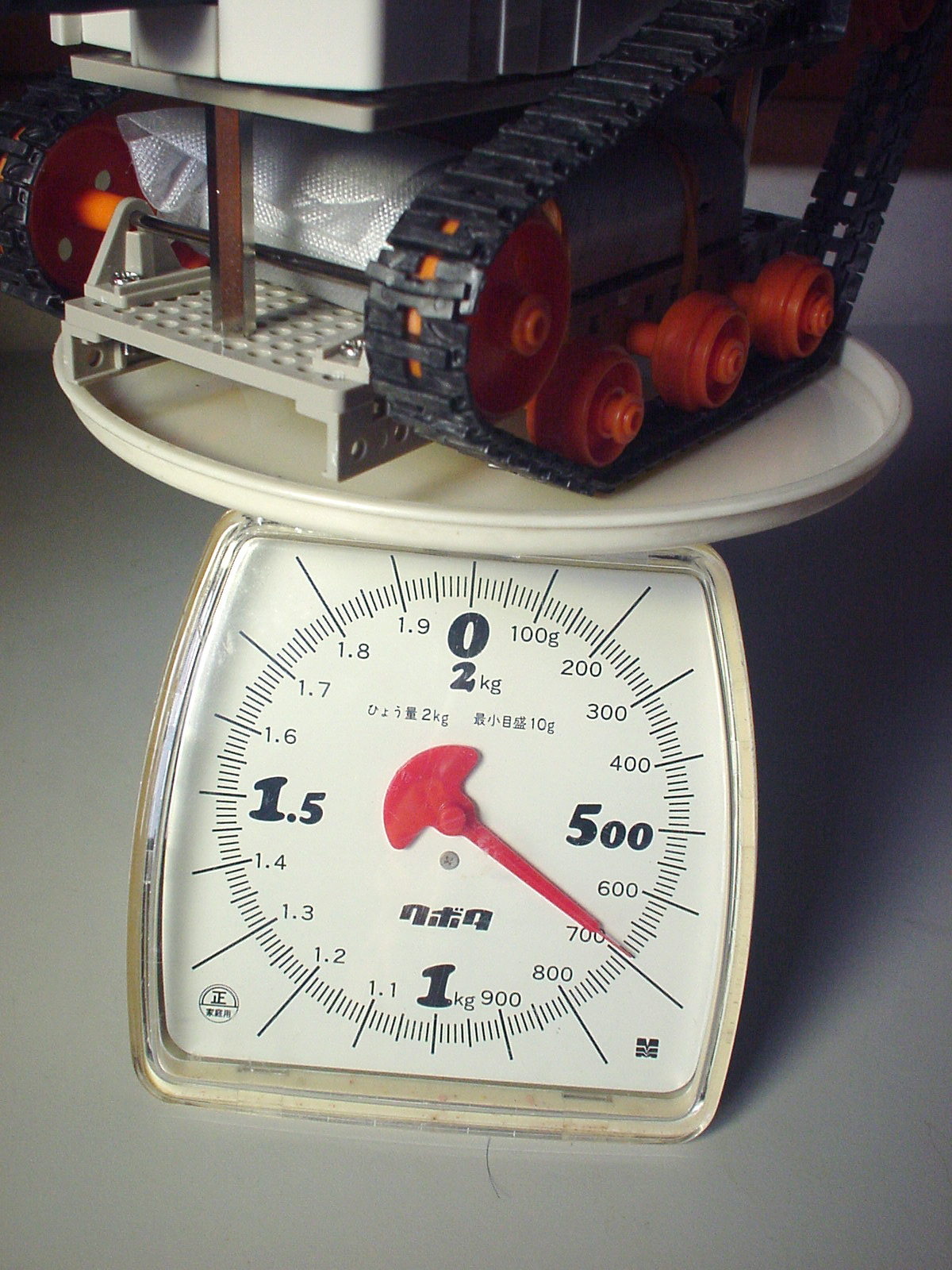
| 総重量 | 約700g |
主な部品
| Raspberry Pi | Model B Rev1.0 BS1224 |
| Raspberry Pi ケース | RSコンポーネンツ ASM1900004_11 |
| バッテリ | ANKER Astro2 |
| 無線LANドングル | PLANEX GW-USValue-EZ |
| カメラ | Logicool C270 |
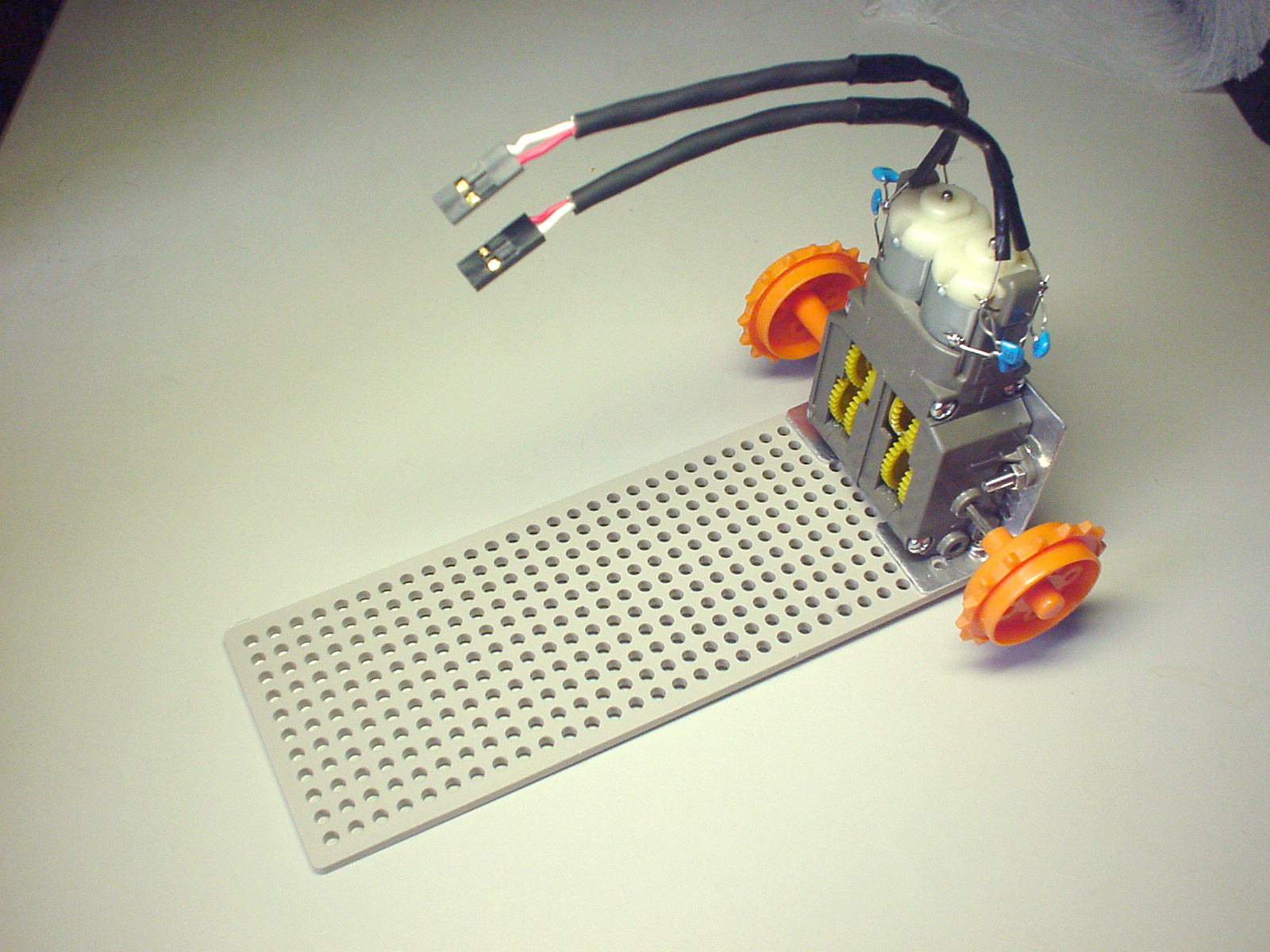
| モータユニット | TAMIYA 70097 ツインモーターギヤーボックス |
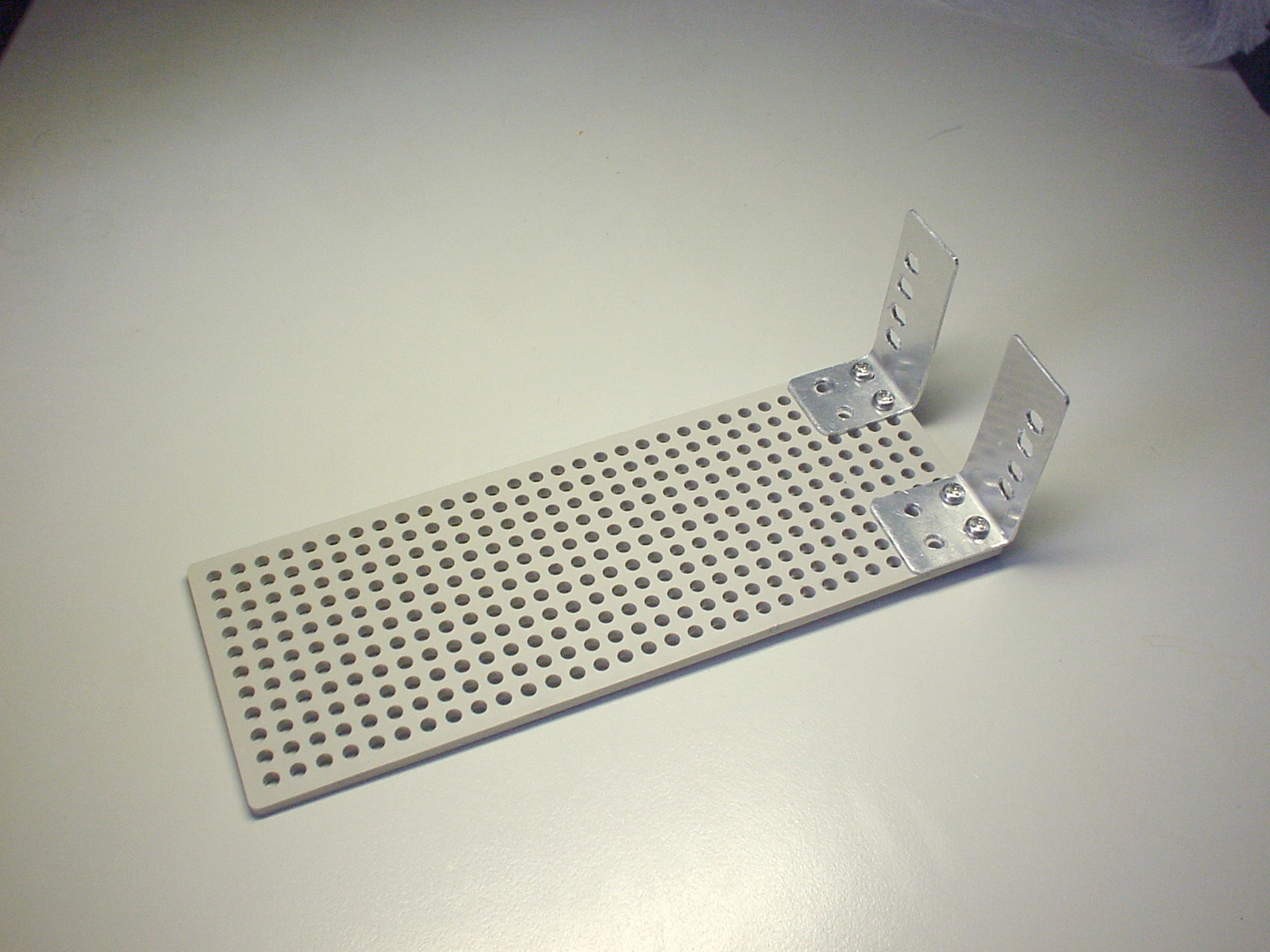
| 車体ベース | AMIYA 70157 ユニバーサルプレート 2枚セット |
| 車輪 | AMIYA 70100 トラック&ホイールセット |
| モータドライブ基板 | 自作(下記のとおり) |
| その他 | アルミ版T=1mm M3金属製六角スペーサL=35mm M3ビス |
バッテリ消費量の見積もり
使用したバッテリは3.7V/8400mAhなので変換効率90%で5Vで出力した場合、5600mAhとなる。Raspberry PiにWiFiドングルとWebカメラを接続して使用した場合、実測値によると600mA程度の消費電流なので、まったく走行させなかった場合、つまり無線ネットワークカメラと同等の状態では、9.3時間という計算になる。一方走行した場合は、上記に加えて走行した時間分だけ消費すると考えられる。使用したモータFA-130の適正電流は500mAなので、PWMのデューティーレシオ75%で制御したとすると左右2台分で750mAとなる。しかし、路面の状態等により一時的な過負荷が生じることやドライバーICでのロスなどを考慮し、2倍の1500mAで見積もってみる。すると、本体とWiFiドングルとWebカメラの分も合わせて全体で、2100mAを消費することなる。従って、連続して走行すると2.6時間という計算になる。
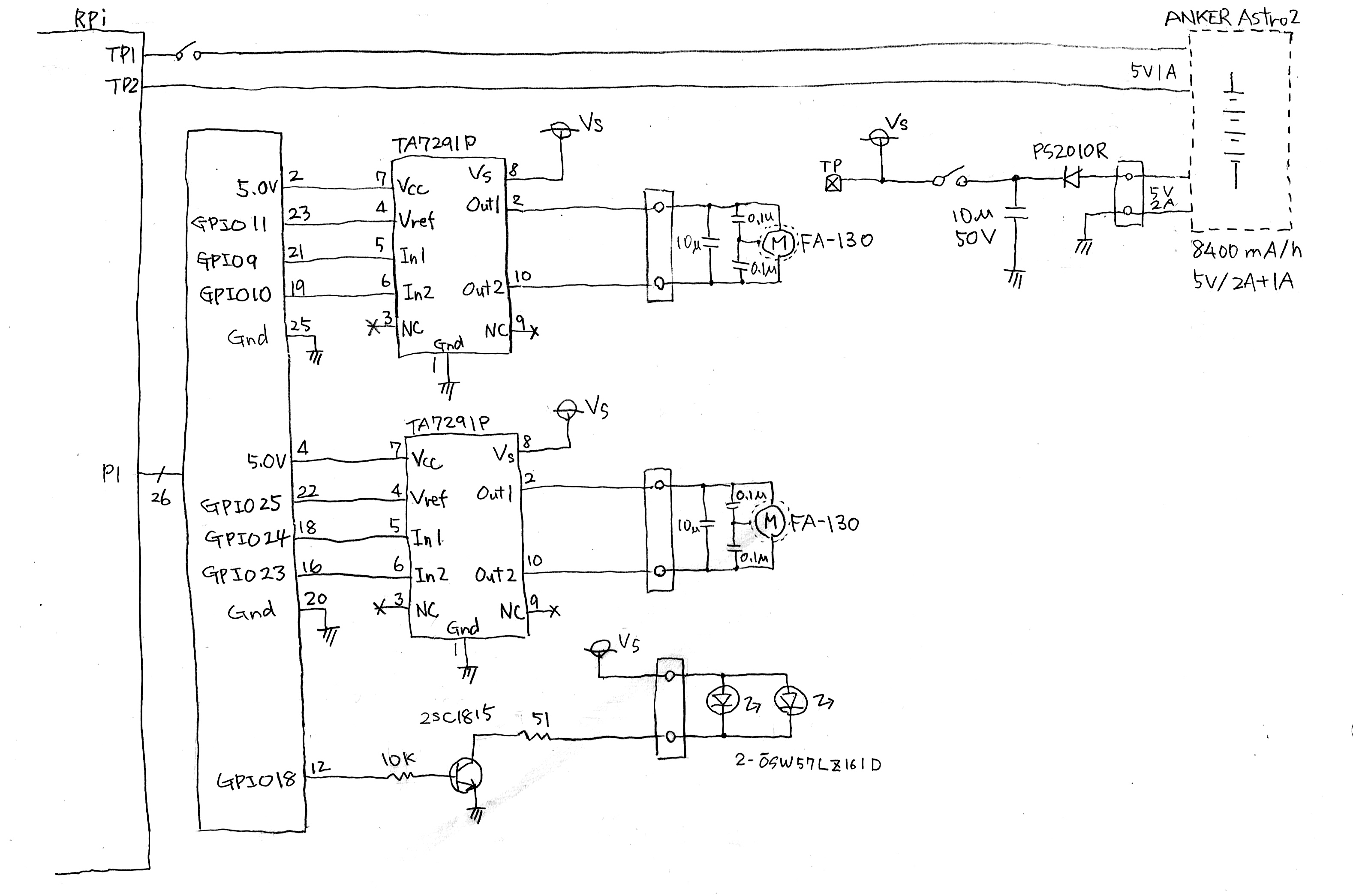
モータドライブ基板
モータドライバIC TA7291Pの使用条件(実測値)
Vcc = 5.0V Vs = 4.73V Vref = 3.4V
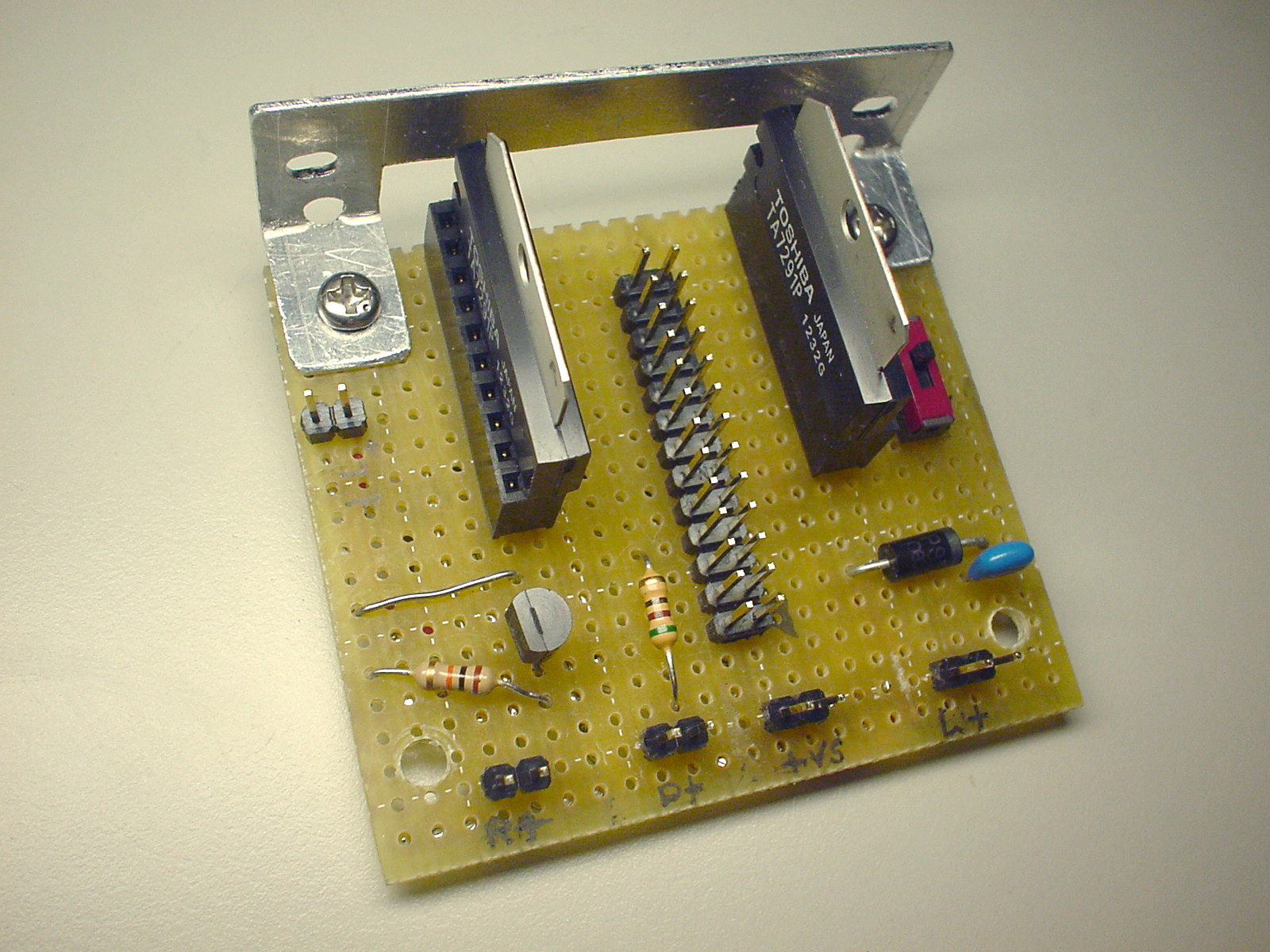
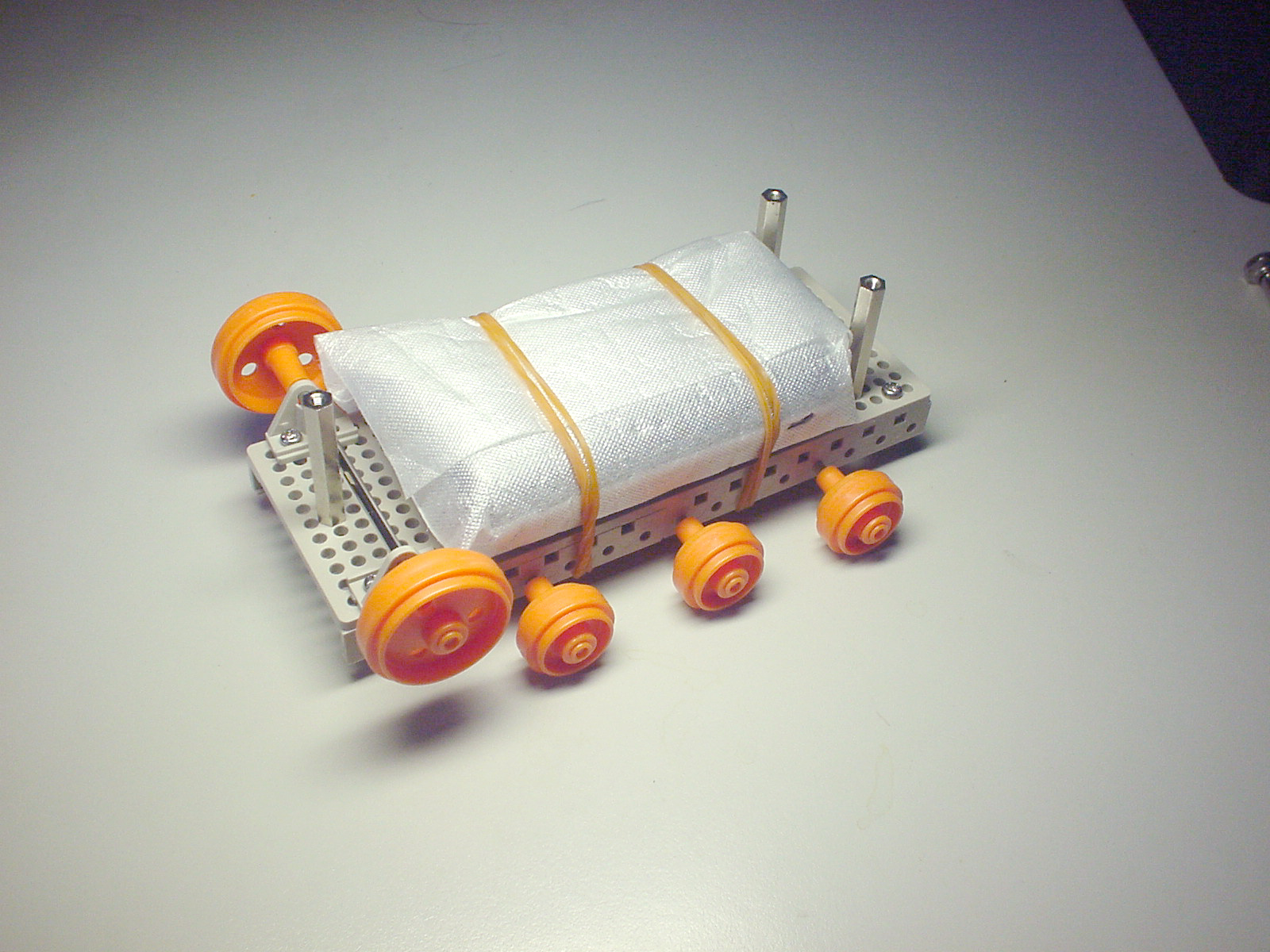
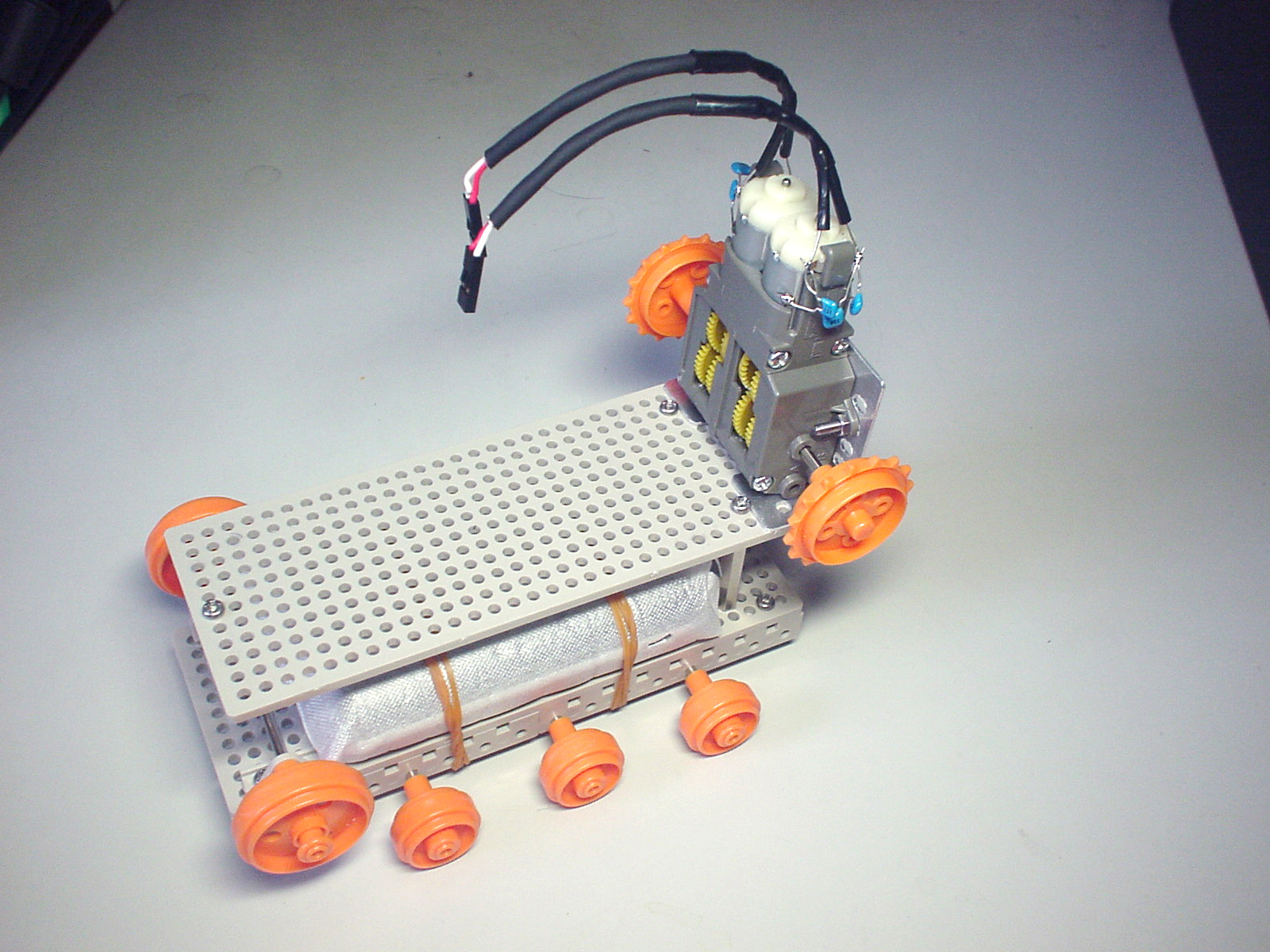
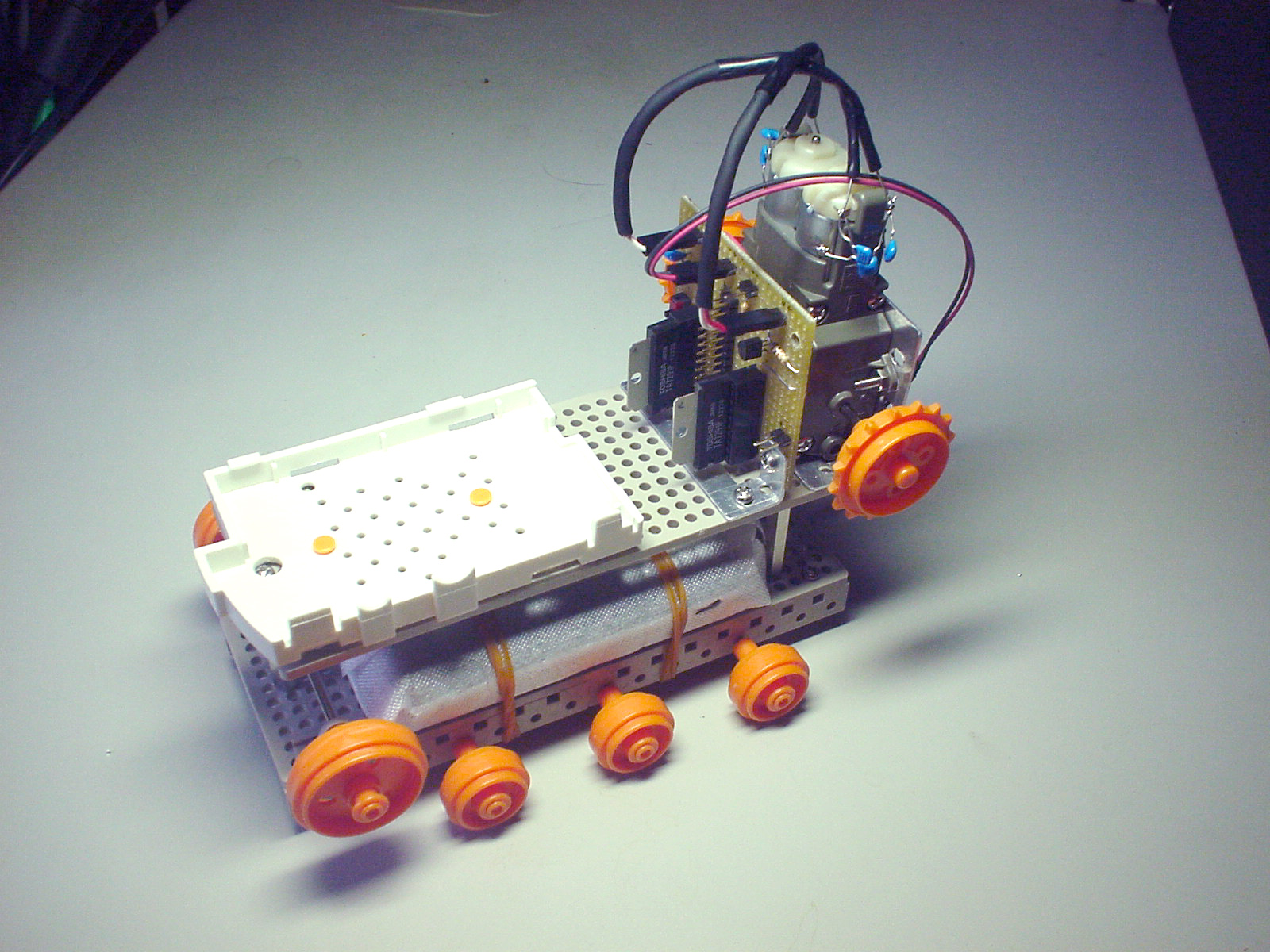
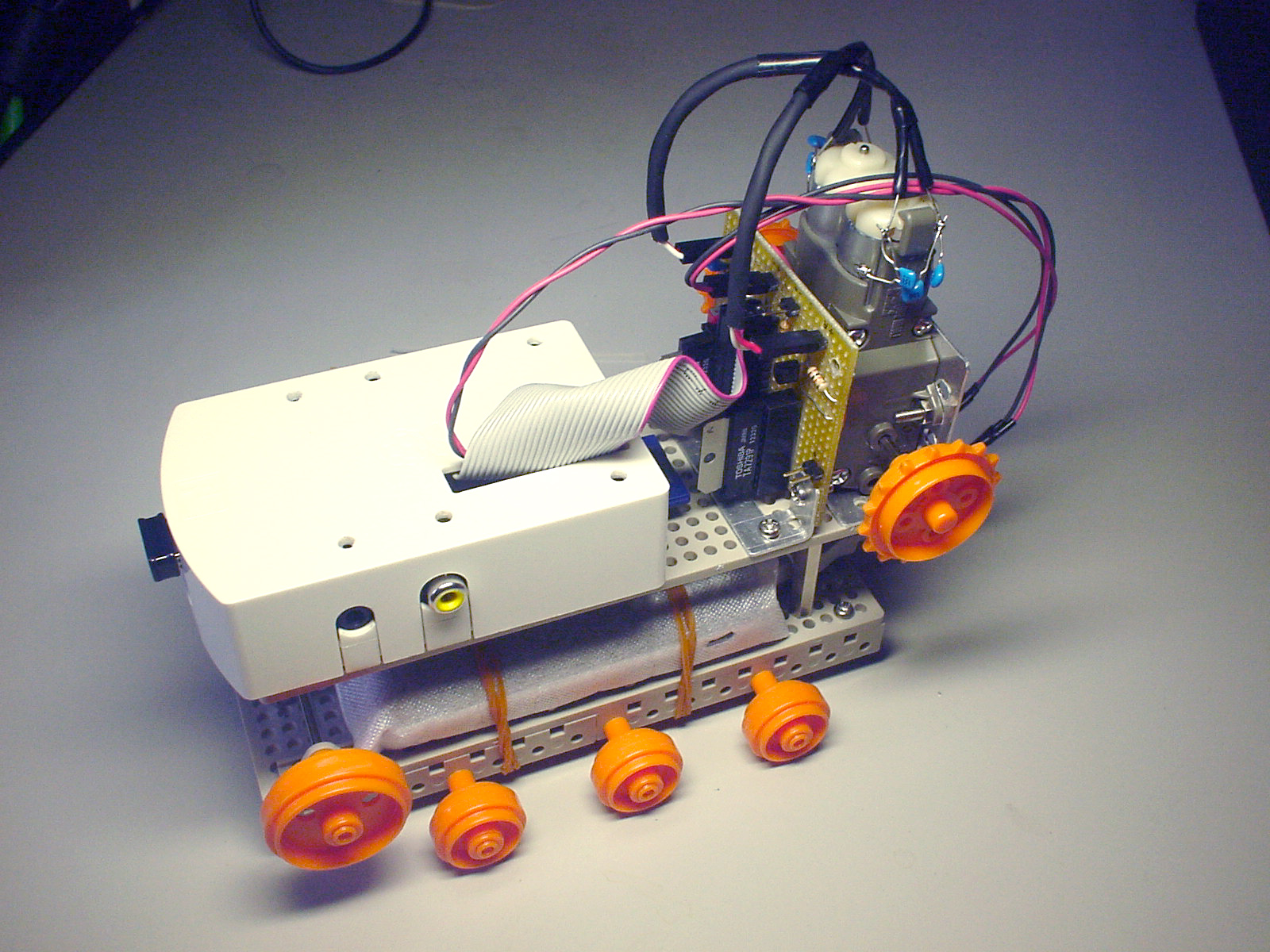
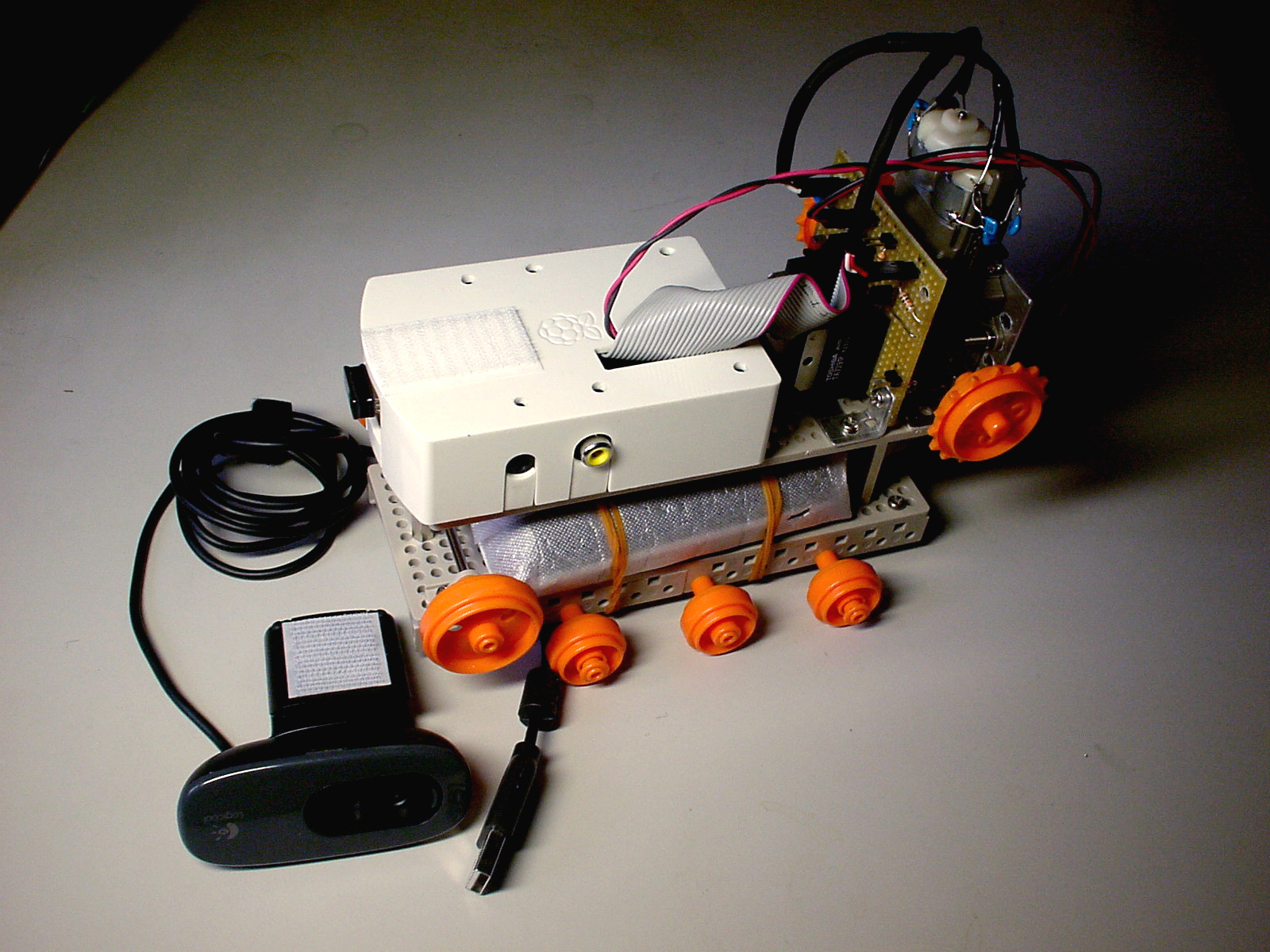
組立



ソフトウェア
Raspberry PiのOSバージョン
2012-12-16-wheezy-raspbian
$ uname -aLinux raspberrypi 3.2.27+ #250 PREEMPT Thu Oct 18 19:03:02 BST 2012 armv6l GNU/Linux
WebIOPiをインストール
$ wget http://webiopi.googlecode.com/files/WebIOPi-0.5.3.tar.gz$ tar xvzf WebIOPi-0.5.3.tar.gz$ cd WebIOPi-0.5.3/$ sudo ./setup.sh
mjpg-streamerをインストール
$ sudo apt-get install subversion$ sudo apt-get install libjpeg-dev imagemagick$ svn co https://mjpg-streamer.svn.sourceforge.net/svnroot/mjpg-streamer mjpg-streamer$ cd mjpg-streamer/mjpg-streamer$ make$ make installinstall --mode=755 mjpg_streamer /usr/local/bininstall --mode=644 input_uvc.so output_file.so output_udp.so output_http.so input_testpicture.so input_file.so /usr/local/lib/install --mode=755 -d /usr/local/wwwinstall --mode=644 -D www/* /usr/local/www
PythonスクリプトとWebページを作成
$ mkdir cambot2$ nano cambot2.py$ nano index.html
Webブラウザ画面対応するWebブラウザはChrome、Safari、Opera
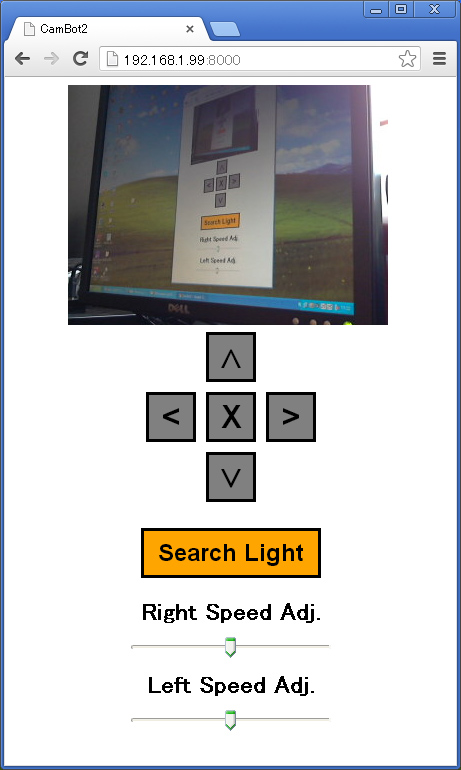
| ∧ | 前進 |
| ∨ | 後退 |
| > | 右旋回 |
| < | 左旋回 |
| Search Light | LED点灯・消灯 |
| Right Speed Adj. | 右速度調整 |
| Left Speed Adj. | 左速度調整 |
rc.localの最後に追加
$ sudo nano rc.local::(cd /home/pi/cambot2 ; sudo python cambot2.py) &export PLUGINPATH=/usr/local/libsudo mjpg_streamer -i "$PLUGINPATH/input_uvc.so -f 25 -r 320x240 -d /dev/video0" -o "$PLUGINPATH/output_http.so -w /usr/local/www -p 8001" &exit 0
モータのノイズでRaspberry Piが誤動作しないための対策
- モータの端子間と端子とモータ本体の金属ケース間にパスコン
- モータケーブルを撚り、シールド
- モータ駆動電源に大容量のパスコン
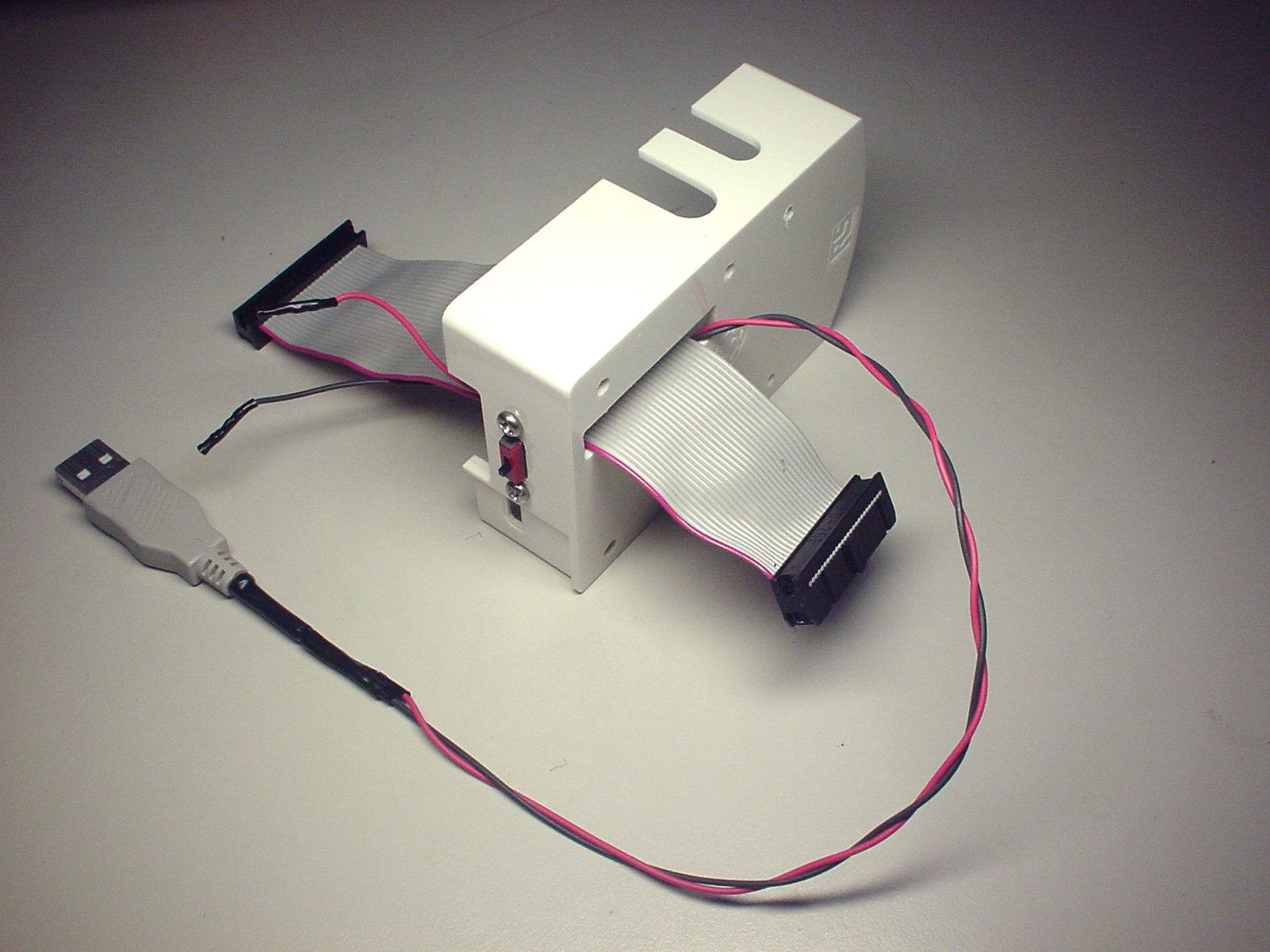
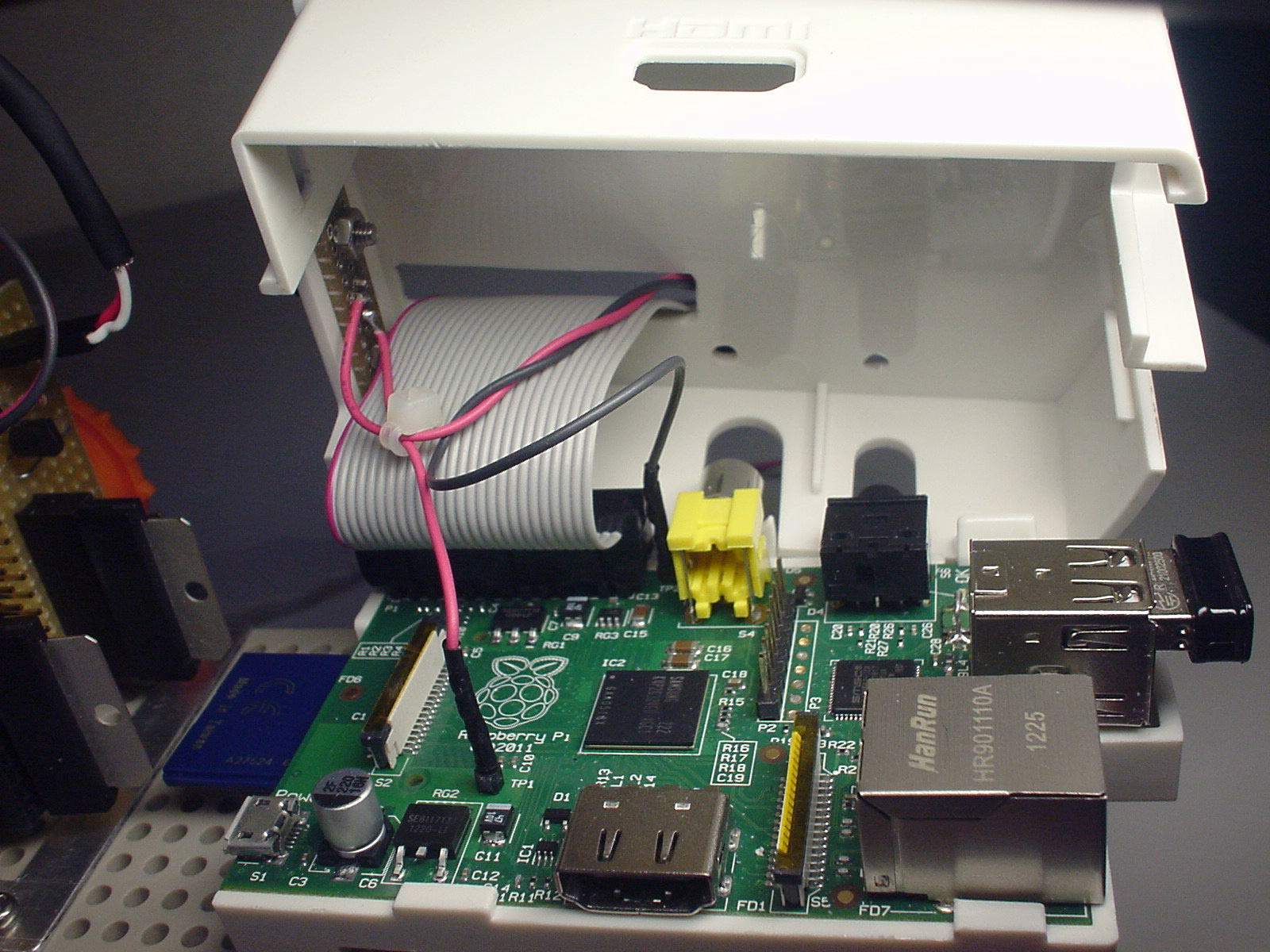
- Raspberry Piの電源ケーブルを撚り
- Raspberry Piの電源ケーブルにフェライトコア(重量軽減のため後に撤去)
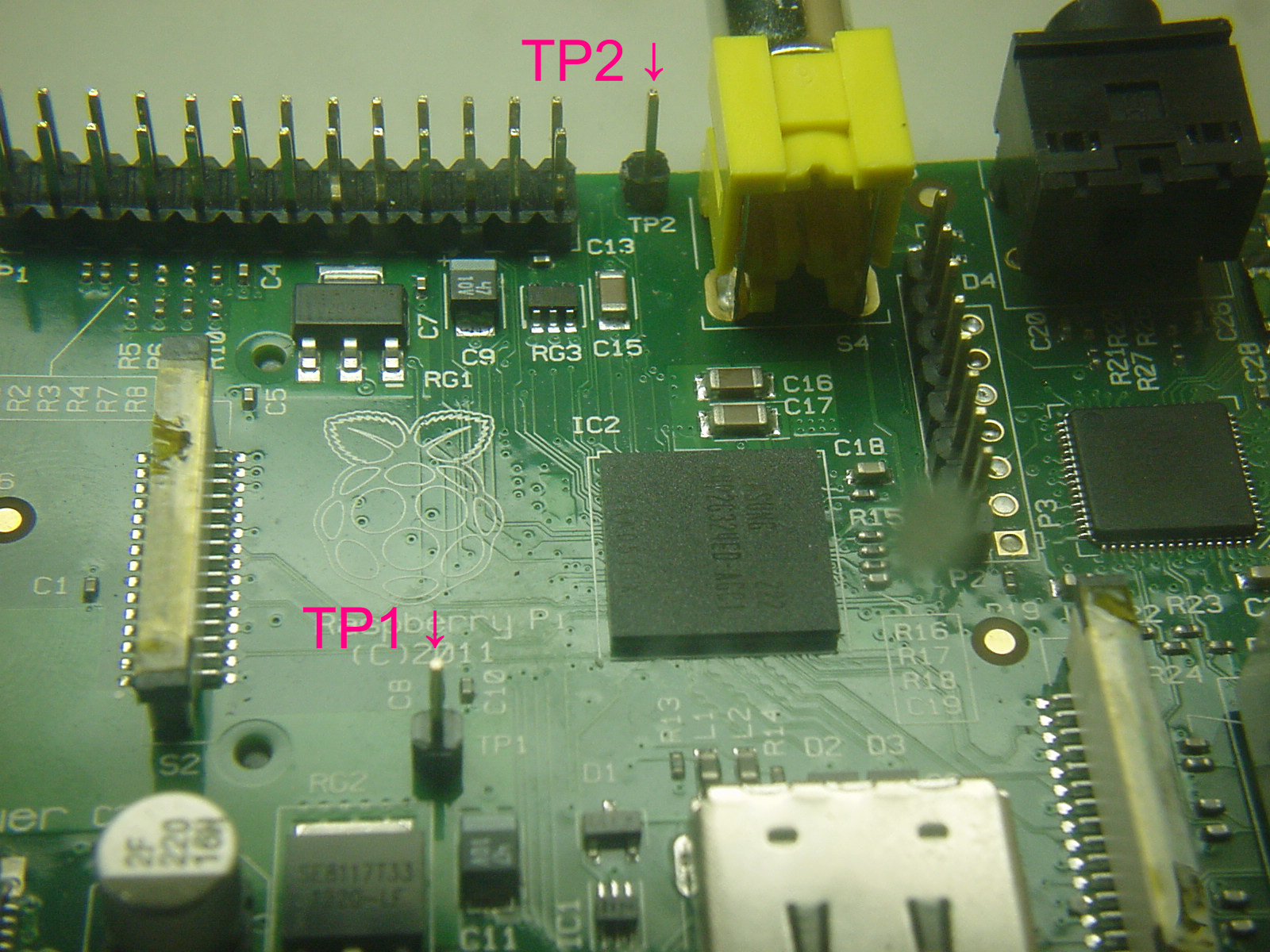
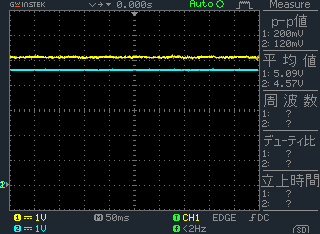
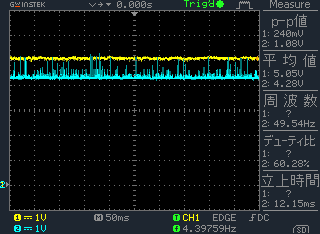
電源周りのノイズ実測結果
CH-1:Raspberry Pi の5V電源(TP1-TP2間)の電圧 CH-2:サーボドライバのモータ供給電源の電圧Vs
モータを駆動しない場合
PWMのデューティーレシオ50%でモータを駆動した場合
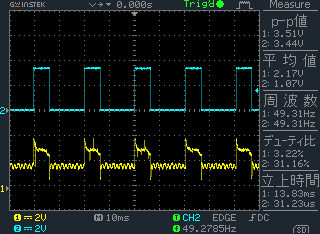
PWMのデューティーレシオ75%でモータを駆動した場合
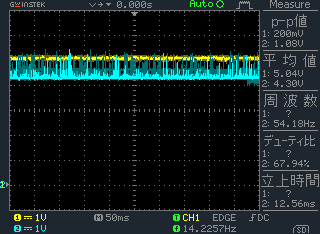
Raspberry Pi の5V電源に誤動作を及ぼすようなレベルのノイズや電圧低下は見られなかった。
CH-1:モータ出力電圧 CH-2:モータのPWM制御電圧Vref≒3.4V
使用感
- 満充電で一切走行させなかった場合、ほぼ見積もり通りバッテリは9時間半あまりもった。走行した場合は、感覚的にだが、見積もり以上に消費が激しい気がする。
- 無線LANのAPとこのカメラ搭載車の間の距離や障害物などの条件によってブラウザーに表示される映像のフレームレートが低下し、操作が遅れて、うまく制御できない場合があった。操作の結果が映像に反映するまで次の操作を少し待つようなコツが必要。
- 毛足の長いカーペットのように柔らかい路面を走行・旋回する時、モータのパワー不足を感じる。
- LEDの照度不足。
- 不正路の走破性は見た目以上によくない。機構設計の問題。
- カメラがチルト(仰角制御)できるといい。
- 温度センサなどを搭載してみたい。
参考MagPi Issue 9 - Feb 2013
2013年02月17日
Copyright © 2015 Yasuo Ogane All Rights Reserved.